ESTAMOS AI NOVAMENTE GALERA.
Tenho visto neste últimos meses que, a maioria das pessoas não sabem como funciona um driver controlador de motores. Principalmente os quando são os famosos motores de passo.
Neste tópico abordaremos o funcionamento de: Motores DC , Motores de Passo e os drivers controladores desses motores. Espero que gostem e não deixem de comentar. Obrigado.
Motores:
Vamos primeiramente falar sobre os 2 tipos de motores mais usados em projetos de eletrônica, robótica e automação, e seu funcionamento, sem entrar em muitos detalhes.
Os motores usados em tais projetos são: Os Motores DC (com ou sem escovas) e os Motores de Passo (unipolares e bipolares).
Motores DC(sem escovas):
Os motores de corrente contínua sem escovas ou motores BLDC (brushless DC), requerem dispositivos MOSFET de alta potência na fabricação do controlador eletrônico de velocidade. Por outro lado, os motores de corrente contínua com escovas podem ser regulados por um resistor variável simples (potenciômetro ou reostato), mesmo sendo ineficiente, ele também pode ser satisfatório para algumas aplicações dependendo do custo-benefício. Seu funcionamento requer alta voltagem em torno 13kv dividido geralmente em 3 fases como se fosse um motor trifásico(fig 1.1),o que nos permite fazer uma ligação estrela/triângulo e por seu sistema de controle ser feito por MOSFETS de de alta potência sua perda energética é menor muito menor se comparado as motores dc com escovas.
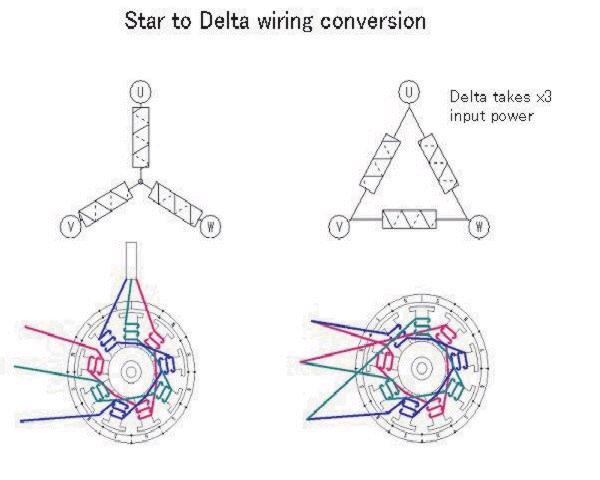 (fig-1.1)
(fig-1.1)
Motores DC(com escovas):

Os motores de corrente contínua com escovas são compostos de 2 estruturas magnéticas:
*ESTATOR (enrolamento de campo ou ímã permanente)
*ROTOR (enrolamento de armadura)

O estator é composto de uma estrutura ferromagnética com polos aos quais são enroladas as bobinas que formam o campo.
O rotor é um eletroímã constituido de um núcleo de ferro com enrolamentos em sua superfície que são alimentados por um sistema mecânico de comutação(escovas).Esse sistema é formado por um comutador, solidário ao eixo do rotor, que possui uma superfície cilíndrica com diversas lâminas às quais são conectados os enrolamentos do rotor; e por escovas fixas, que exercem pressão sobre o comutador e que são ligadas aos terminais de alimentação.A finalidade do comutador(fig2.1 e 2.2) é a de inverter a corrente na fase de rotação apropriada de forma a que o conjugado desenvolvido seja sempre na mesma direção.
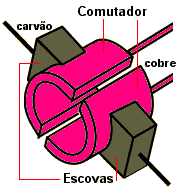 Fig2.1
Fig2.1  Fig2.2
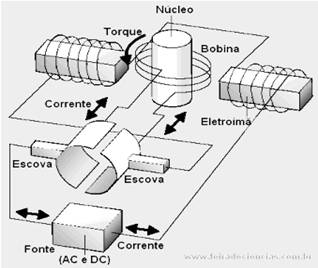
Fig2.2
Esquemático do motor dc com escovas:
2-3-4-5-6








| Enquete | ||
|
|
1 |
Porque idéias brilhantes, vem de mentes simples.



